
Robot z AGH działa na poziomie komórkowym
- Szczegóły
- Kategoria: numer 6
- 08 czerwiec 2011
Temat z okładki
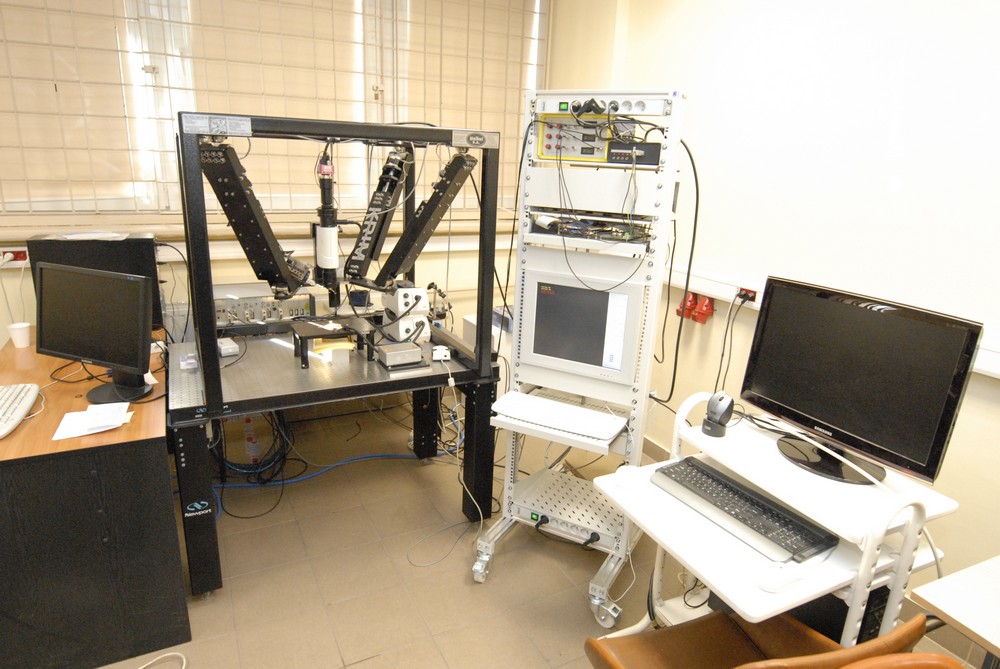
Wprowadzić precyzyjnie narzędzie do pojedynczej komórki – proszę bardzo – w AGH wszystko jest możliwe. Tak duże usprawnienie prac w mikrobiologii jakie oferuje robot hybrydowy skonstruowany w Katedrze Robotyki i Mechatroniki Wydziału IMiR możliwe jest dzięki trzyletniej pracy dziesięcioosobowego zespołu. Koszty prac nad prototypem to pół miliona złotych.
Robot jest hybrydą. Składa się z dwóch części: makro i mikro robota. Część makro odnajduje komórki w badanym materiale, a część mikro przystosowana jest do manipulacji w komórkach. Badania, do których może być wykorzystany robot, możliwe były do wykonania również do tej pory, jednak wymagały od badaczy niezwykłej precyzji i dobrej kondycji fizycznej, ponieważ eksperymenty trwają czasem kilkanaście godzin. urządzenie jest stabilne i niepodatne na wstrząsy. Maszyna jest unikatową konstrukcją w skali światowej. Prace nad jego udoskonaleniem prowadzone są w dalszym ciągu, a szczegółowy opis urządzenia przedstawiamy poniżej. (red)
Następujący gwałtowny rozwój biotechnologii wymaga coraz bardziej zaawansowanych technik manipulacji na poziomie komórki i wewnątrz komórki. Wykorzystywane są w tym celu manipulatory manualne lub z napędami, z wykorzystaniem telemanipulacji, wymagające sterowania przez doświadczonego operatora, który kontroluje przebieg procesu wzrokowo, przez mikroskop. Niektóre badania wymagają, aby narzędzie pozostawało w tym samym miejscu komórki przez wiele godzin, co jest trudne do uzyskania, ze względu na naturalne ruchy komórek oraz przemieszczanie się narzędzia pod wpływem wydłużania cieplnego elementów manipulatora i relaksacji naprężeń powstających podczas ruchu. W przypadku badań elektrofizjologicznych techniką patch-clamp istnieją dodatkowe utrudnienia:
– mała przestrzeń do manipulacji, wynikająca ze stosowania optyki mikroskopowej, charakteryzującej się małą (rzędu 2 mm) odległością obiektywu od preparatu,
– konieczność pracy w bliskiej podczerwieni, aby osiągnąć odpowiednią głębokość wizualizacji w badanej tkance (ok. 100 µm), przy czym zbyt duża intensywność oświetlenia powoduje niedopuszczalne podgrzanie tkanki,
– niedopuszczalność przemieszczenia elektrody pomiarowej względem komórki o więcej niż 1 um w trakcie pomiaru,
– niedopuszczalność generacji zakłóceń elektromagnetycznych, ze względu na bardzo małe natężenia mierzonych prądów (rzędu pA); z tego względu musi istnieć możliwość zamknięcia stanowiska w klatce Faradaya,
– kruchość submikronowej końcówki mikropipety, pełniącej rolę elektrody pomiarowej, która, aby nie została uszkodzona, musi być wprowadzana w tkankę wyłącznie poosiowo.
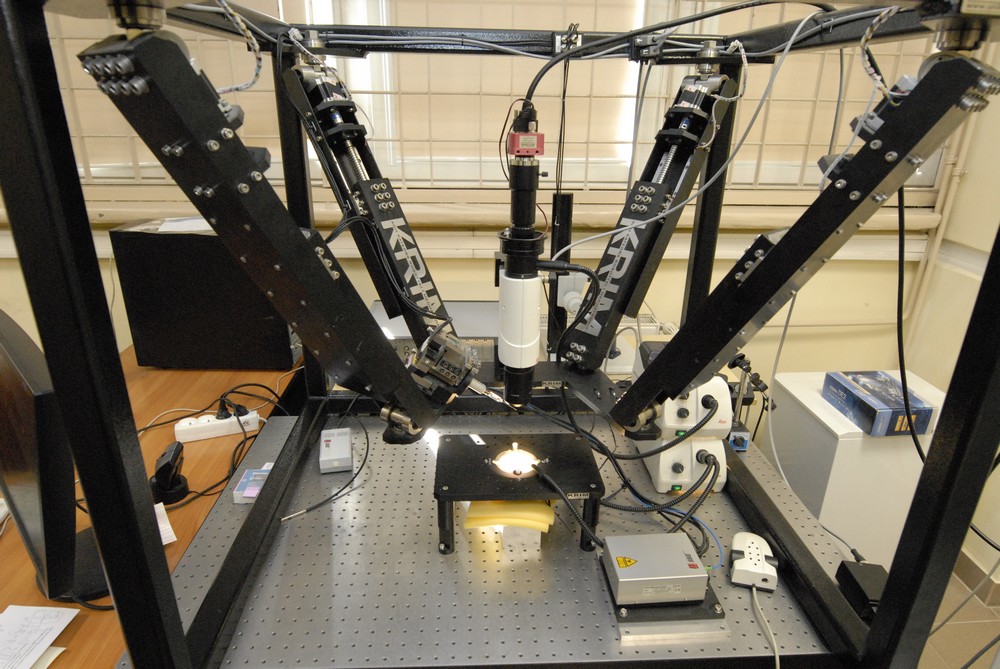
W ramach projektu rozwiązano problem manipulacji wewnątrzkomórkowej przez zastosowanie sterowanego wizyjnie robota hybrydowego, składającego się z równoległego makromanipulatora o czterech stopniach swobody, z zamocowanym na nim mikromanipulatorem szeregowym o trzech stopniach swobody, z elastycznymi przegubami złączowymi, napędzanym napędami piezoelektrycznymi, który przemieszcza precyzyjnie narzędzia, oraz kamery z makroskopowym układem optycznym o dużym powiększeniu.
Dzięki zastosowaniu unikalnego algorytmu przetwarzania obrazów możliwe jest odtworzenie informacji o trzecim wymiarze, pewne przemieszczanie narzędzia w okolicy i w obrębie komórki oraz długoczasowa stabilizacja względnego położenia komórki i narzędzia.
Rozdzielne w czasie wykonywanie operacji w skali makro i mikro pozwoliło na eliminację drgań i zakłóceń elektromagnetycznych pochodzących od makromanipulatora, którego silniki są wyłączone w trakcie mikromanipulacji. Zastosowanie makromanipulatora równoległego pozwala na łatwy i swobodny wybór obszaru tkanki, w którym przeprowadzane są eksperymenty oraz dużo łatwiejszą, niż w istniejących rozwiązaniach, wymianę i obsługę narzędzi i preparatu biologicznego. Wykorzystanie makroskopowego układu optycznego zwiększyło o rząd wielkości odległość obiektywu od preparatu, pozostawiając dużą przestrzeń do manipulacji. Podstawa (rama) makromanipulatora pozwala na zabudowanie na niej klatki Faradaya.
Wprawdzie pierwszym zastosowaniem opracowanego robota jest wspomaganie badań patch-clamp, jego konstrukcja jest zaprojektowana w ten sposób, aby umożliwić, po dodaniu drugiego mikromanipulatora, przeprowadzanie również innych eksperymentów biologicznych, takich jak np. badania nad zachowaniem komórek hodowanych in vitro po dokomórkowej iniekcji substancji stymulujących i inhibujących ich rozwój. Wymaga to zlokalizowania odpowiedniej komórki w roztworze, przy czym obszar poszukiwań odpowiedniej komórki przekracza znacznie przestrzeń właściwej manipulacji i pole widzenia nieruchomego mikroskopu. Następnie zlokalizowaną komórkę chwyta się jedną mikropipetą w celu unieruchomienia, a drugą mikropipetą, przez którą wykonywana jest iniekcja, precyzyjnie przebija się przez błonę komórkową tak, aby jak najmniej ją uszkodzić, a po iniekcji precyzyjnie wycofuje. Metodą ta można również dokonywać wymiany wybranych elementów wnętrza komórki, np. jądra czy cytoplazmy, co ma zastosowanie m.in. w inżynierii genetycznej i sztucznym zapłodnieniu.
Robot równoległy o nowatorskiej strukturze kinematycznej charakteryzuje się istnieniem analitycznego rozwiązania zadania prostego i odwrotnego kinematyki, wysoką dokładnością i rozdzielczością pozycjonowania, niskim poziomem generowanych zakłóceń elektromagnetycznych oraz dobrym tłumieniem drgań. Oryginalna konstrukcja mikrorobota zapewnia wysoką precyzję ruchów w stosunkowo dużej przestrzeni roboczej oraz bardzo dobre tłumienie drgań. Dla obydwu robotów opracowano generatory trajektorii oraz sterowanie, zapewniające wymaganą dokładność śledzenia trajektorii oraz pozycjonowania. Informacja o wzajemnym położeniu narzędzia i obiektu manipulacji (komórki) dostarczana jest przez system optyczny, w skład którego wchodzi makroskopowy tor optyczny o sterowanych parametrach, kamera o wysokiej rozdzielczości, system oświetlenia oraz algorytmy przetwarzania i analizy obrazu.
W oparciu o opracowaną metodologię, algorytmy sterowania oraz przetwarzania obrazów zostały zaimplementowane w układzie FPGA, co pozwala na wykonywanie przetwarzania i realizację sterowania w czasie rzeczywistym. Robot wyposażony jest w dedykowany, intuicyjny interfejs człowiek-maszyna w postaci panelu operatorskiego, wyposażonego w ekran dotykowy, umożliwiający wybór operacji, modyfikację parametrów i ciągły podgląd przeprowadzanych manipulacji poprzez wyświetlanie przetworzonego obrazu z kamery.
Prototyp robota został nagrodzony złotym medalem Międzynarodowych Targów Poznańskich w 2009 roku.
• Maciej Petko
Zespół badawczy:
• dr hab. inż. Maciej Petko (kierownik)
• dr hab. inż. Wojciech Lisowski (badania drgań)
• dr inż. Jarosław Bednarz (badania drgań)
• dr Tomasz Błasiak (założenia neurofizjologiczne, konsultacje merytoryczne, preparaty do badań)
• dr inż. Grzegorz Karpiel (układ sterowania, FPGA, konstrukcja makrorobota)
• dr inż. Daniel Prusak (konstrukcja mikrorobota)
• dr inż. Mariusz Szwedo (system wizyjny, przetwarzanie i analiza obrazów)
• dr inż. Jan Targosz (wibroizolacja)
• mgr inż. Janusz Ochoński (układ sterowania)